Dissertation: Biped Gait Controller With Active Perturbation
Robots can aid humans in various activities: the aging society can benefit from robot companions; robots can be used in hazardous situations, such as firefighting or working on radioactive environments; or they could be used to increase efficiency or reduce costs of regular tasks such as freight. To effectively accomplish these tasks the robots can benefit from the mobility legged locomotion provides. Therefore my research goal is to develop a gait controller for biped robots.
I’ve designed Bipo, a robot designed to represent biped gait simplified to the sagital plane. It will serve as a test platform for different gait controllers in the Biomecatronics Laboratory at University of São Paulo.

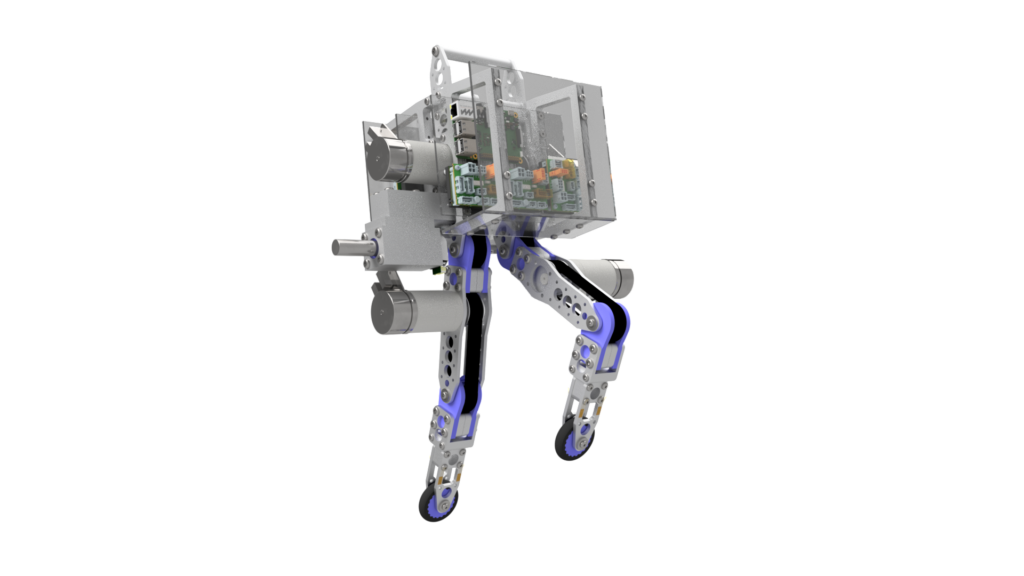

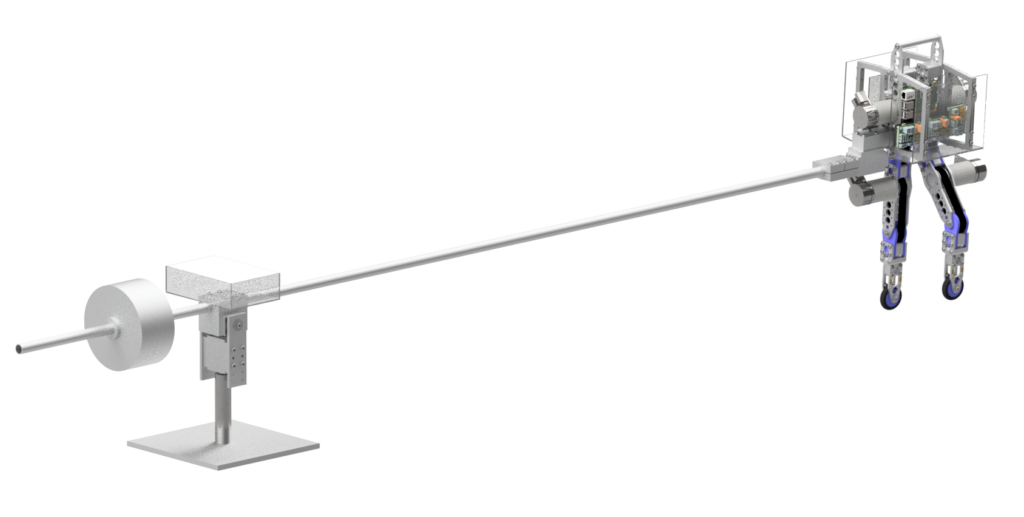
Simulations with Bipo physical properties were conducted using Matlab, below we can see the gait controller, based on N-Step Capturability, overcoming a constant push; going uphill; push recovery (top of the page) and walking on sinusoidal terrain: