At the TREC Lab I continued the research on legged locomotion I started during my Master’s.
On the video below I have implemented the DRC Kinematics Based State Estimator from IHMC on our robot. It is using the IMU that I am holding to update the robots orientation in space, as it can be seen on SCS2 up on the computer screen.
Below is the work I have conducted during my first year at HDSRL.
I have started to explore Machine Learning using massive parallel RL (leveraging both Isaac Gym from NVIDIA and ETH Zurich legged gym) to train Pandora.

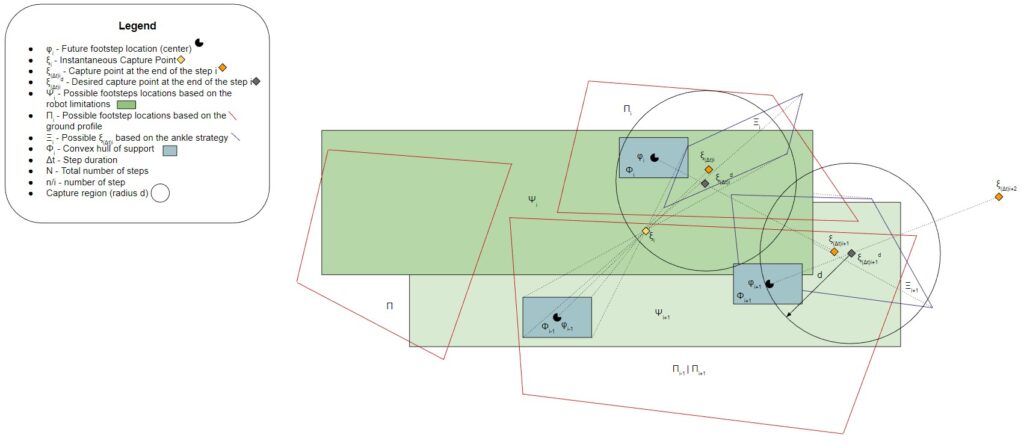
I have also worked on model based approaches: an optimization algorithm also based on Capture Point, that finds optimal footstep locations using both the footstep adjustment and ankle strategies.
For TREC’s 3D printed humanoid robot, we used IHMC Open Robotics Software to run Pandora, which gave me the opportunity to learn Java and some of the available algorithms.
Below you can also see the concept video we made (not online) of teleoperation, one of the goals we aimed for in the lab: